- Hochschule Trier
- Campus wählen
- Quicklinks
-
- English
Ziel des Kooperationsprojektes war es, einen robotergestützten Assistenten zur Refabrikation von Elektromotoren zu entwickeln. Dieses Ziel konnte in den letzten fünf Jahren durch eine Vielzahl von Bachelor- und Masterarbeiten und vor allem durch die erfolgreiche Promotion von Herrn Jan Jungbluth verwirklicht werden.
Bei der Refabrikation handelt es sich um einen industriellen Prozess, bei dem gebrauchte und eventuell abgenutzte Komponenten wieder in einen Zustand wie neu oder besser gebracht werden sollen. Der Prozess steht im Einklang mit technischen Spezifikationen wie Produktions-, Qualitäts- und Prüfstandards. Durch Refabrikation können in erheblichem Maße Ressourcen eingespart und Emissionen reduziert werden.
Allerdings erfolgt die Refabrikation der technischen Bauteile meistens manuell, wodurch die Wirtschaftlichkeit verringert wird. Bedingt ist der hohe Anteil an manuellen Tätigkeiten durch mehrere Faktoren, wie z.B. fehlende Produktinformationen, ein meist unbekannter Zustand der gebrauchten Teile und eine relativ geringe Stückzahl bei einer hohen Variantenvielfalt.
Einen wichtigen Teilschritt des Refabrikationsprozesses stellt die Demontage dar. Um die manuellen Tätigkeiten in diesem Teilschritt zu verringern wurde innerhalb der Zusammenarbeit die Mensch-Roboter-Kooperation untersucht. Hierbei arbeiten Roboter und Mensch zusammen an einem hybriden Arbeitsplatz. An diesem unterstützt der Roboter den Menschen durch assistierende Tätigkeiten. Außerdem ist es möglich, dass Prozessschritte, abhängig von ihrer Komplexität, voll automatisiert vom Roboter ausgeführt werden können. Ein Schlüssel zu einer erfolgreichen und reibungslosen Mensch-Roboter-Kooperation bei Demontageprozessen ist die Ausstattung der Robotersysteme mit weitreichender Autonomie und Intelligenz.
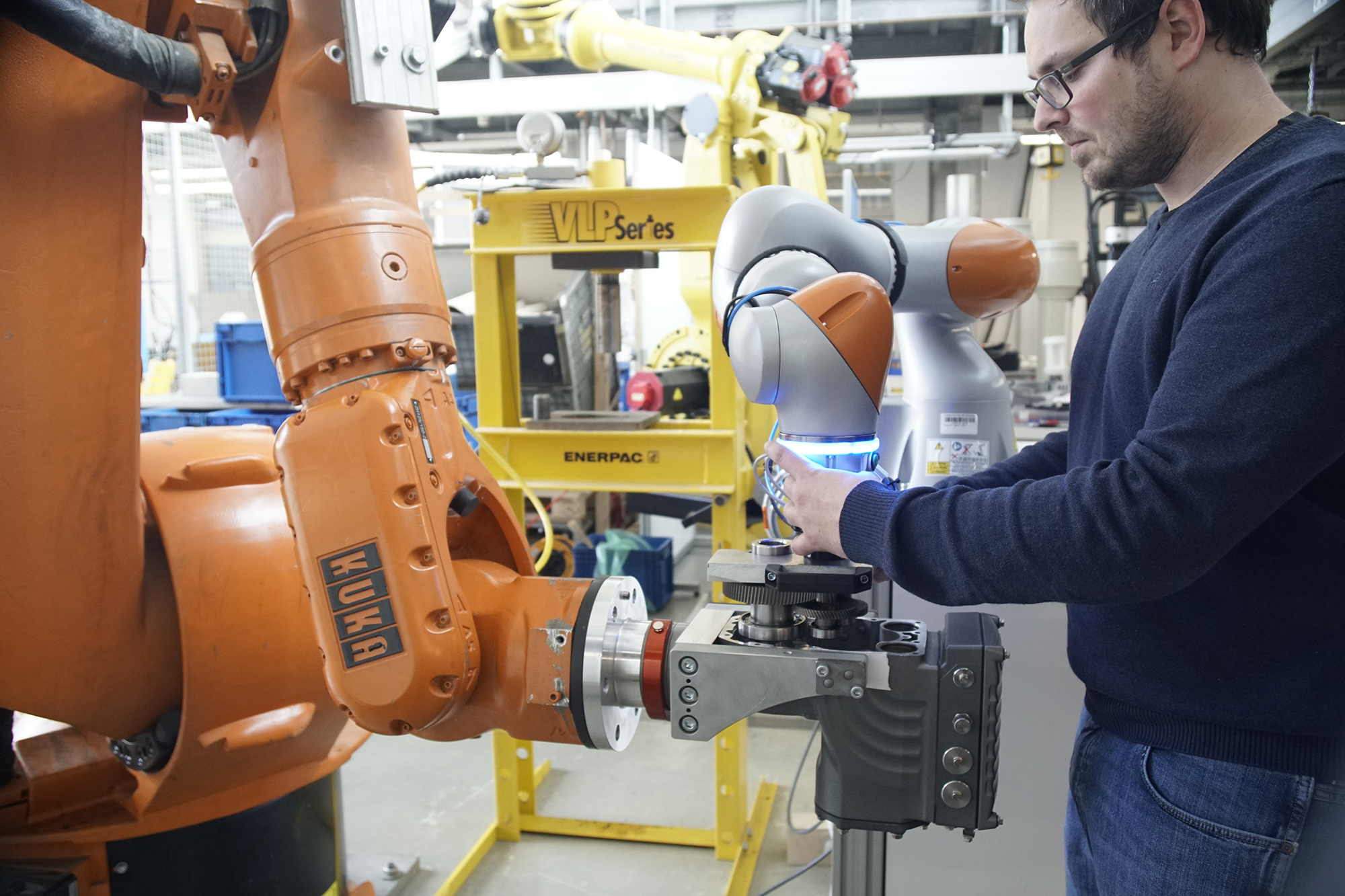
Im Bild sieht man Jan Jungbluth bei der Arbeit an dem im Projekt entstanden Testaufbau im Technikum des Umwelt-Campus. Dieser wird genutzt, um die im Projekt entstanden Konzepte in der Praxis zu überprüfen. Der Aufbau besteht aus einem Elektromotor von SEW, der als beispielhaftes Produkt zu Demontage dient. Da der Motor während der Demontage bewegt werden muss, wird er aufgrund seines recht hohen Gewichts (ca. 25 kg) vom linken Roboter geführt. Der kleinere Roboter in der Mitte wird zur Handhabung von Zahnrädern genutzt, welche in abgebildeten Arbeitsschritt entnommen werden. Besonders ist dabei, dass man den Roboter bei diesem Schritt mittels Handführung bewegen kann.
Sie verlassen die offizielle Website der Hochschule Trier