- Hochschule Trier
- Campus wählen
- Quicklinks
-
- English
Die drahtlose Steuerung von Robotern ist ein zentrales Element moderner cyber-physischer Systeme. In klassischen Ansätzen erfolgt die Kommunikation häufig über WLAN oder Bluetooth, was jedoch mit Latenzen, Infrastrukturabhängigkeit oder erhöhtem Energieverbrauch verbunden sein kann. Besonders in zeitkritischen Anwendungen – etwa bei der synchronen Bewegung von Robotern – sind diese Technologien nicht immer optimal geeignet. Eine alternative Lösung bietet das proprietäre Kommunikationsprotokoll ESP-NOW, das direkt zwischen Mikrocontrollern kommuniziert und dabei ohne klassisches Netzwerk auskommt. Durch die direkte Peer-to-Peer-Verbindung lassen sich Daten mit sehr geringer Latenz und hoher Effizienz übertragen. Dies eröffnet neue Möglichkeiten für die Echtzeitsteuerung verteilter Systeme.
In diesem Tutorial wird das Konzept der sogenannten „Teleportation“ von Bewegungen umgesetzt: Zwei identische Roboteraufbauten werden verwendet, wobei die Bewegungen eines Systems in Echtzeit auf das andere übertragen werden. Die Positionsdaten der eingesetzten Servomotoren werden erfasst, drahtlos über ESP-NOW gesendet und auf der Empfängerseite unmittelbar reproduziert. Ziel des Tutorials ist es, ein grundlegendes Verständnis für latenzarme, direkte Kommunikation zwischen Mikrocontrollern zu entwickeln und diese praktisch in einer Robotikanwendung umzusetzen. Die Studierenden lernen dabei, wie Sensordaten erfasst, effizient übertragen und in Aktorsignale übersetzt werden, um synchronisierte Bewegungsabläufe zu realisieren.
Im Gegensatz zu klassischen PWM-Servos verfügen smarte Servos über integrierte Mikrocontroller und Kommunikationsschnittstellen (siehe Tutorial). Sie ermöglichen nicht nur die Ansteuerung, sondern auch das Auslesen von Zustandsdaten. Durch das integrierte Feedback können Gelenkpositionen präzise erfasst und direkt übertragen werden. Damit bilden smarte Servos die Grundlage für die „Teleportation“ von Bewegungen. Eine zweite essentielle Komponente ist eine Netzwerkverbindung zur Datenübertragung. ESP-NOW ist ein von Espressif Systems entwickeltes Kommunikationsprotokoll für ESP32/ESP8266-Mikrocontroller. Es ermöglicht eine direkte drahtlose Verbindung zwischen Geräten ohne die Notwendigkeit eines WLAN-Routers. In unserem Fall ist die Reichweite damit durch die Antenne des ESP-Moduls beschränkt.
Technische Eigenschaften und Vorteile für die Robotik:
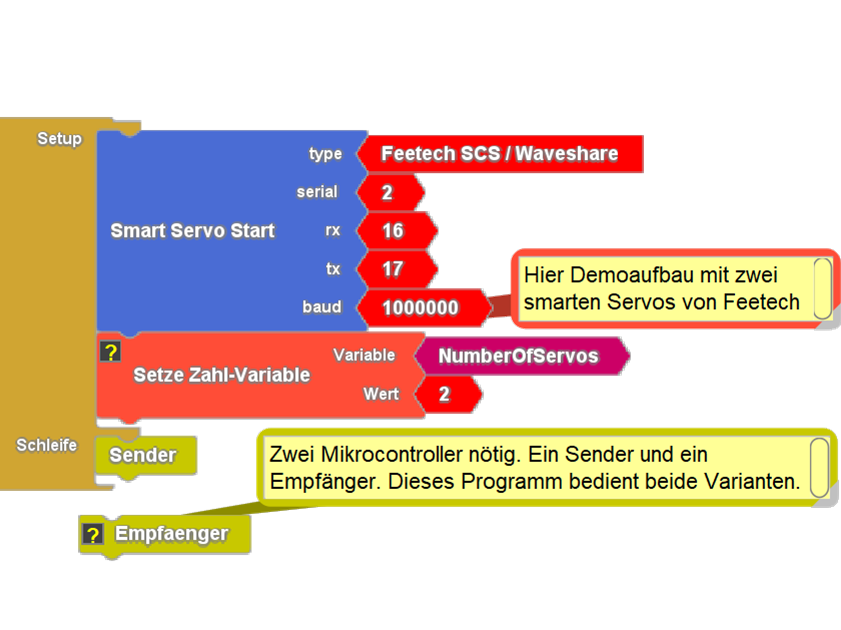
Das Gesamtsystem basiert auf einer Architektur mit zwei identischen Aufbauten: Der Sender liest aktuelle Servo-Positionen aus, bereitet die Daten auf, sendet sie über ESP-NOW. Der Empfänger empfängt Positionsdaten, setzt diese direkt in Servo-Befehle um. Aufgrund der begrenzten Paketgröße, bietet sich die Übertragung nur von Winkelwerten statt vollständiger Zustände an. ESP-NOW bietet keine garantierte Zustellung d. h. ggf. sind Wiederholmechanismen oder Plausibilitätsprüfungen sinnvoll.
Die im ersten Tutorial zu den Dynamixel Servos kennengelernten Funktionen “Lesen des Istwertes” und “Setzen des Sollwertes” bilden die Grundlage für unseren Algorithmus. Dazu benötigen wir zwei identische Aufbauten: Den Sender und den Empfänger. Beide nutzen das ESP-NOW-Protokoll zur Kommunikation. Die Blöckchen finden sich im Baukasten “Wifi / ESP-NOW”.

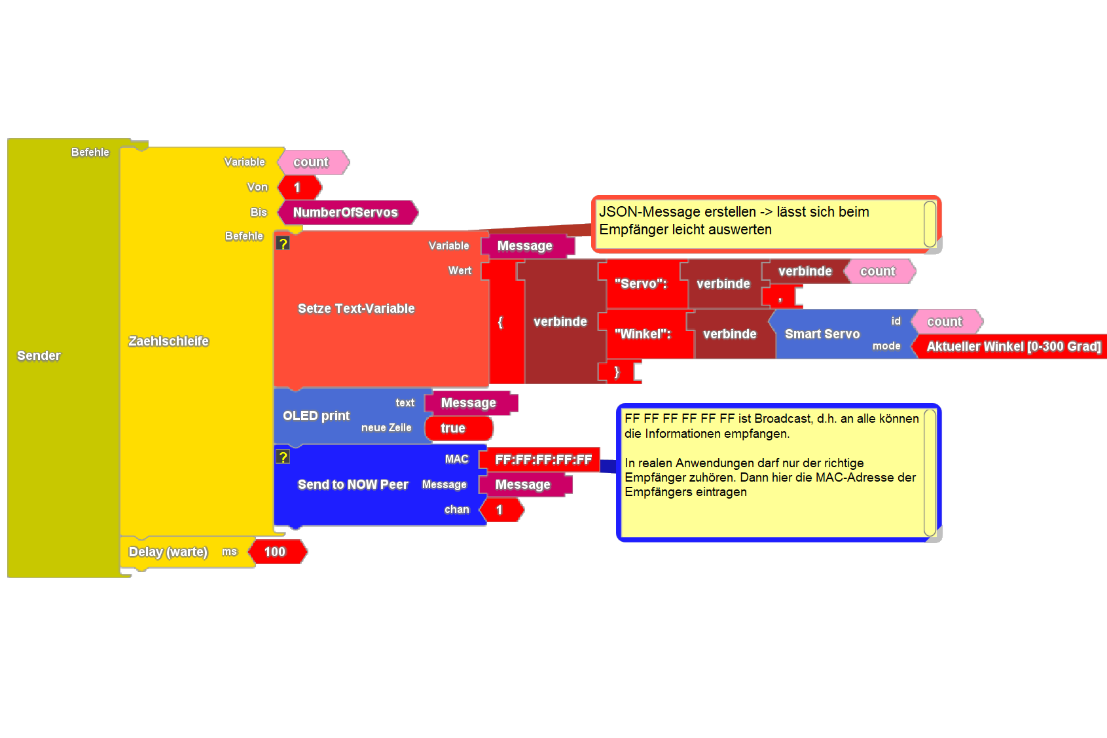
Das zyklisch ausgeführte Unterprogramm für den Sender (also dem Roboter, der vor Ort bedient wird). Hier werden die Servos kraftlos geschaltet und anschließend zyklisch die jeweilige Winkelposition ausgelesen. Die Kommunikation nutzt das JSON Format zum textbasierten Datenaustausch. im unserem Fall sieht ein übertragenes Objekt folgendermaßen aus {"Servo":id, “Winkel”:Grad} . Damit ist die Winkelposition für das Servo mit der id eindeutig kodiert. Um den Konfigurationsaufwand für die Inbetriebnahme zu verringern, wird unser Objekt ausnahmsweise im Broadcast ( = an Alle) übertragen. Dazu dient beim ESP-NOW Protokoll die Broadcast-Adresse “FF:FF:FF:FF:FF:FF”. Soll ein spezifischer Empfänger gewählt werden, so ist dort dessen weltweit eindeutige MAC-Adresse einzugeben. Ist die unbekannt, findet sich im Baukasten WiFi/ESP-NOW ein entsprechendes Blöckchen, um die Adresse auszulesen.

Auf der Empfängerseite wird für jede empfangene Nachricht ein Callback (= Unterprogrammaufruf) ausgelöst. Innerhalb des Callbacks werten wir den JSON Text aus und suchen die entsprechenden Schlüsselworte für id und Winkel (Blöckchen im Baukasten HTTP). Nur wenn das Ergebnis plausibel erscheint, wird die Information direkt an das Servo gesendet - hier wäre im Realsystem zum Beispiel eine Prüfsumme zur Fehlererkennung sinnvoll.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an VCRP/Panopto übermittelt. Weitere Informationen dazu finden Sie hier.
Durch die Kombination aus smarten Servos und ESP-NOW entsteht ein leistungsfähiges System zur Echtzeit-Fernsteuerung von Robotern. Während die Servos präzise Positionsdaten liefern und umsetzen, sorgt ESP-NOW für eine schnelle und direkte Kommunikation zwischen den Mikrocontrollern.
Diese Architektur bildet die Grundlage für Anwendungen wie:
Im praktischen Teil des Tutorials wird dieses Konzept implementiert und schrittweise zu einem funktionierenden „teleportierenden“ Robotersystem aufgebaut.
Sie verlassen die offizielle Website der Hochschule Trier