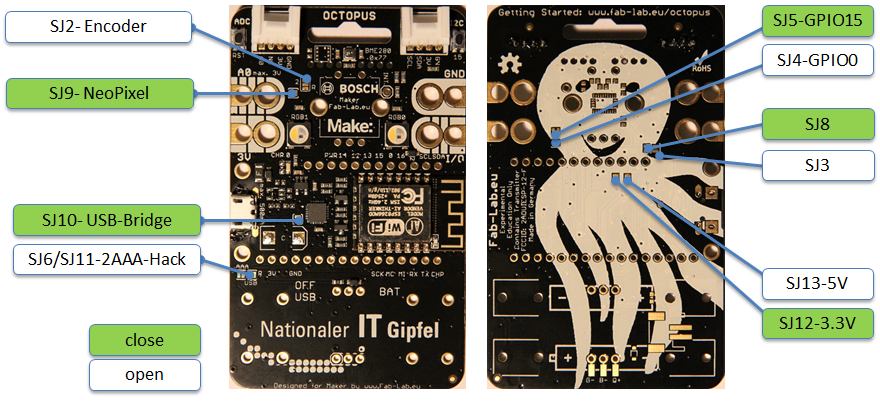
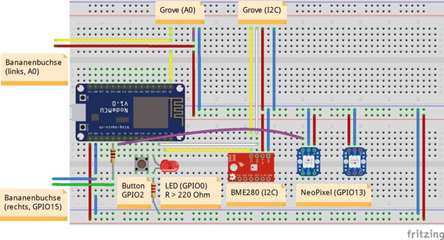
Schaltplan, die Position der Jumper finden sich auf den nächsten Abbildungen.
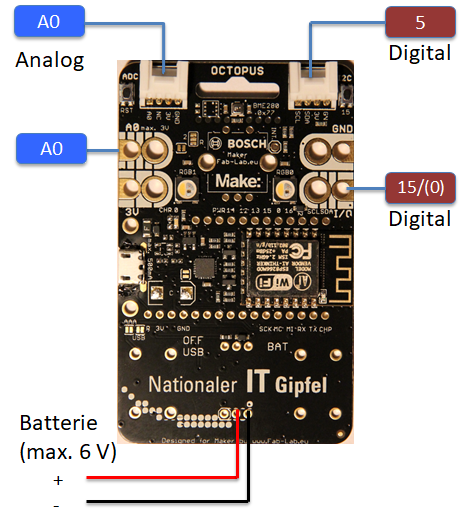
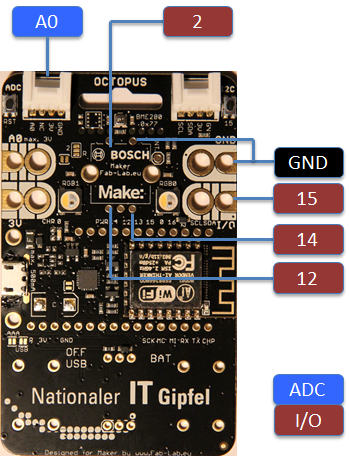
Der Analog-Eingang A0 lässt sich wahlweise über die Bananensteckerbuchsen oder den Grove-Connector nutzen (0-3.3V). Der Grove-I2C-Connector kann auch als Digital-Grove (Input/Output, GPIO5) genutzt werden. Dann ist der I2C-Bus ohne Funktion. Der GPIO15 steht an der rechten Bananenbuchse zur Verfügung ( auf GPIO0 umzukonfigurieren). Wahlweise kann das Board auch über eine externe Batterie versorgt werden.
Auf der Platine ist Platz für die Bestückung mit einem Drehencoder. Alternativ können die GPIO-Pins für andere Zwecke genutzt werden.
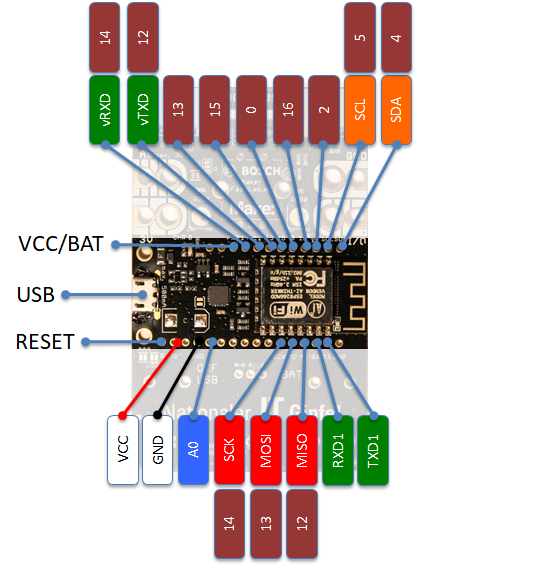
Alle Pins des ESP8266 sind auf der Feather-kompatiblen Anschlussleiste herausgeführt.
Verschiedene Lötbrücken sorgen für eine flexible Anpassung der Hardware an die eigene Anwendung:
Besonderes Augenmerk haben wir auf die Energieversorgung gelegt: Mit durchtrennen der Lötbrücke SJ9 lassen sich die Neopixel abschalten und benötigen dann auch keinen Ruhestrom. Mit SJ10 wird zusätzlich auch der USB-Treiberbaustein abgeschaltet - eine Programmierung über USB ist dann allerdings nicht mehr möglich. Mit SJ6/SJ11 erfolgt die Abschaltung des LDO Spannungsreglers. Diese Option kommt nur beim Betrieb mit 3 Volt in Frage, z.B. beim AAA-Hack das Board dann direkt aus den zwei AAA Zellen der Batteriehalter versorgt.
Die Kombination SJ4/SJ5 wählt den an der rechten Bananenbuchse anliegenden GPIO-Kanal (default ist GPIO15).
SJ8/SJ3 und SJ12/13 wählen die Versorgungsspannungen für das Feather-Shield.
DIY - Octopus im Eigenbau
Mit unserem IoT-Ardublock Erweiterungen lassen sich auch andere ESP8266 basierte Entwicklungsplatinen zum Leben erwecken. Allerdings vermissen wir dort die auf dem Octopus vorhandenen flexiblen I/O-Möglichkeiten sehr schmerzlich. Basierend auf dem Schaltplan lassen sich diese natürlich auch mit externen Bauteilen[1] auf einem Breadboard nachbilden.